Vous pouvez CONNECTER de petits servomoteurs directement à un Arduino pour contrôler la position de l’arbre très précisément.
étant donné que les servomoteurs utilisent la rétroaction pour déterminer la position de l’arbre, vous pouvez contrôler cette position très précisément. En conséquence, les servomoteurs sont utilisés pour contrôler la position des objets, faire pivoter les objets, déplacer les jambes, les bras ou les mains des robots, déplacer les capteurs, etc. avec une grande précision., Les servomoteurs sont de petite taille, et parce qu’ils ont des circuits intégrés pour contrôler leur mouvement, ils peuvent être connectés directement à un Arduino.
la plupart des servomoteurs ont les trois connexions suivantes:
- fil de terre Noir / Marron.
- fil d’alimentation rouge (environ 5 V).
- fil PWM jaune ou blanc.
dans cette expérience, nous allons connecter les broches d’alimentation et de masse directement aux broches Arduino 5V et GND. L’entrée PWM sera connectée à l’une des broches de sortie numérique de L’Arduino.,
l’Expérience 1
Matériel Requis
- 1 x TowerPro SG90 servo moteur
- 1 x Arduino Mega2560
- 3 x fils de connexion
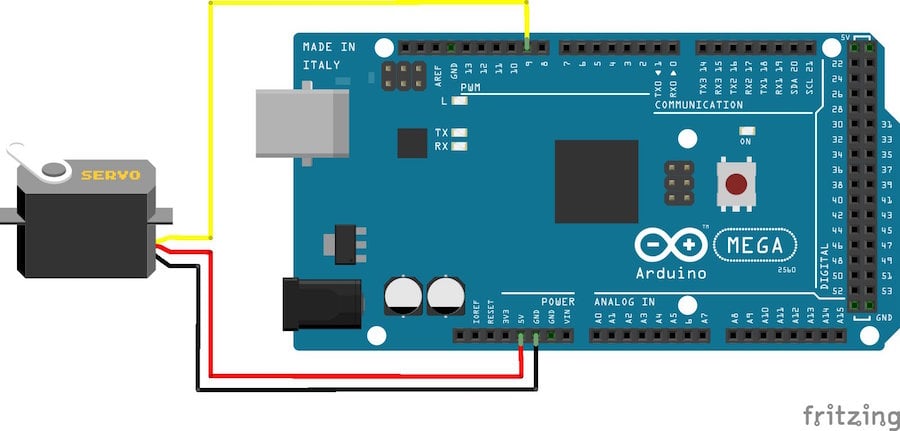
Schéma de Câblage
La meilleure chose à propos d’un servo-moteur est qu’il peut être directement connecté à un Arduino. Connecter le moteur à l’Arduino, comme indiqué dans le tableau ci-dessous:
- Servo de fil rouge – 5V pin Arduino
- Servo fil marron – Motif pin Arduino
- Servo fil jaune – PWM(9) pin Arduino
Attention: Ne pas essayer de tourner le servo-moteur à la main, car vous pourriez endommager le moteur.,
Code
Lorsque le programme démarre, le servo-moteur tournera lentement de 0 à 180 degrés, d’un degré à la fois. Lorsque le moteur a tourné de 180 degrés, il commencera à tourner dans l’autre sens jusqu’à ce qu’il revienne à la position d’origine.
Servo_Motor.zip
Experiment 2
Cette expérience est essentiellement la même que L’Expérience 1, sauf que nous avons ajouté un potentiomètre pour le contrôle de la position. L’Arduino Lira la tension sur la broche centrale du potentiomètre et ajustera la position de l’arbre du servomoteur.,
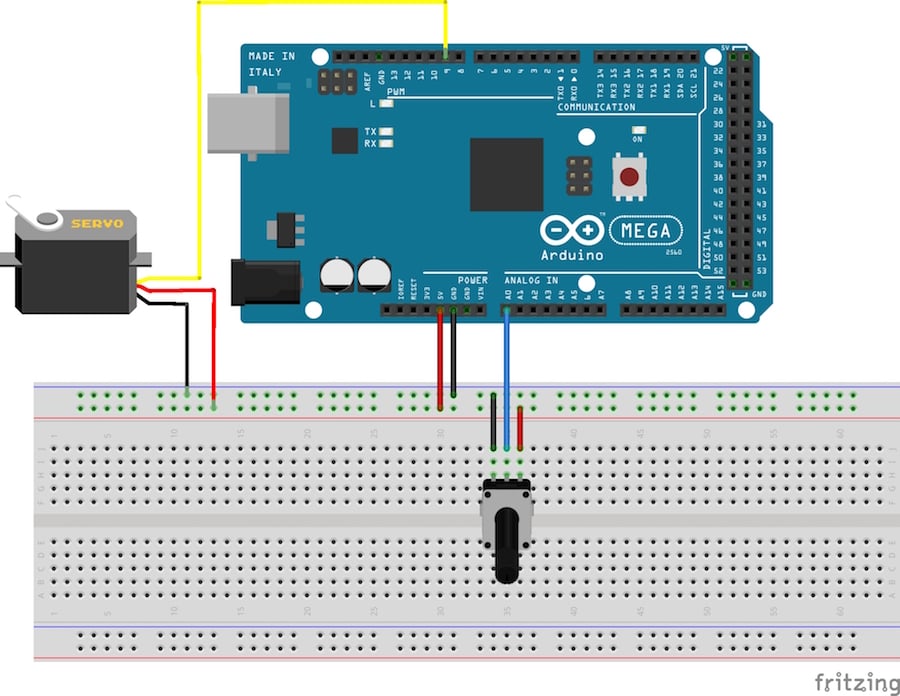
schéma de câblage
connectez le circuit comme indiqué sur la figure ci – dessous:
- Servo fil rouge – broche 5V Arduino
- Servo fil brun – broche de masse Arduino
- Servo fil jaune – PWM(9) 3 – broche de terre Arduino
- broche potentiomètre 2 – broche analogique in (A0) Arduino
code
Une fois le programme démarré, la rotation du potentiomètre devrait faire tourner l’arbre du servomoteur.,
servo_motor_with_arduino.zip
essayez ce projet par vous-même! Obtenez la nomenclature.




